In my work with hydroponics robots, I recently faced challenges related to robot localization and map resolution. After consulting with ChatGPT, I discovered that the lidar and map were not synchronizing properly due to issues with the robot’s odometry.
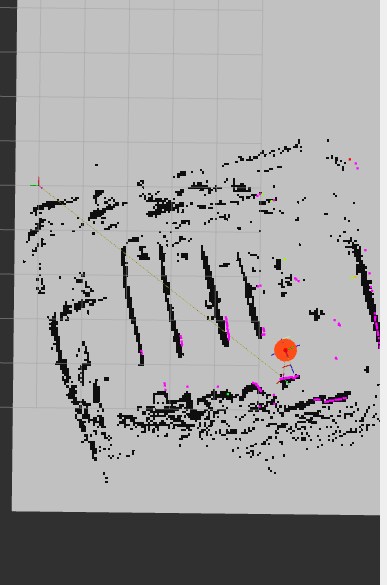
Fortunately, I was able to resolve the issue and the robot is now able to navigate between two lanes successfully multiple times. However, I still had concerns about the map resolution and decided to test creating the map in a higher resolution.
While this initially proved challenging, I discovered that I had been using the wrong launch file. After fixing this issue, I started with a resolution of 0.01 but found it to be too slow. I then increased the resolution to 0.025 and found that it looked much crisper than the previous 0.05 resolution. Moreover, I did not encounter any issues with the map drifting while generating it, which was a significant improvement from my previous attempts.
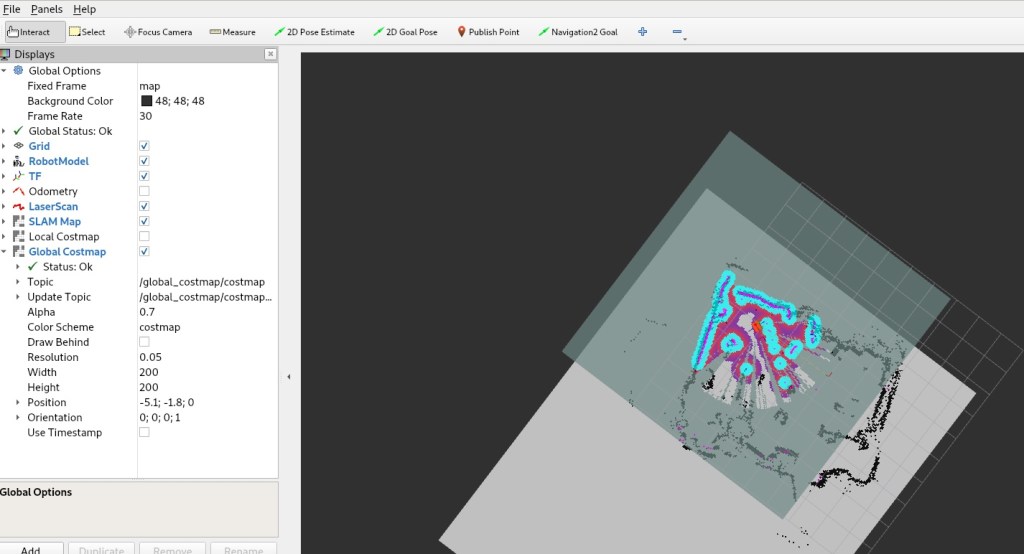
However, my virtual machine struggled to process the map with the local cost map and global cost map both set to 25mm. To address this issue, I plan to increase the global cost map to 50mm to see if it helps with processing.
Improving robot localization and map resolution is crucial for the success of hydroponics robots, and I am excited to continue exploring ways to optimize these processes for even better results.