
Hi everyone,
I’ve been following the Articulated Robots tutorial series which has helped me to create a self navigating diff drive robot.
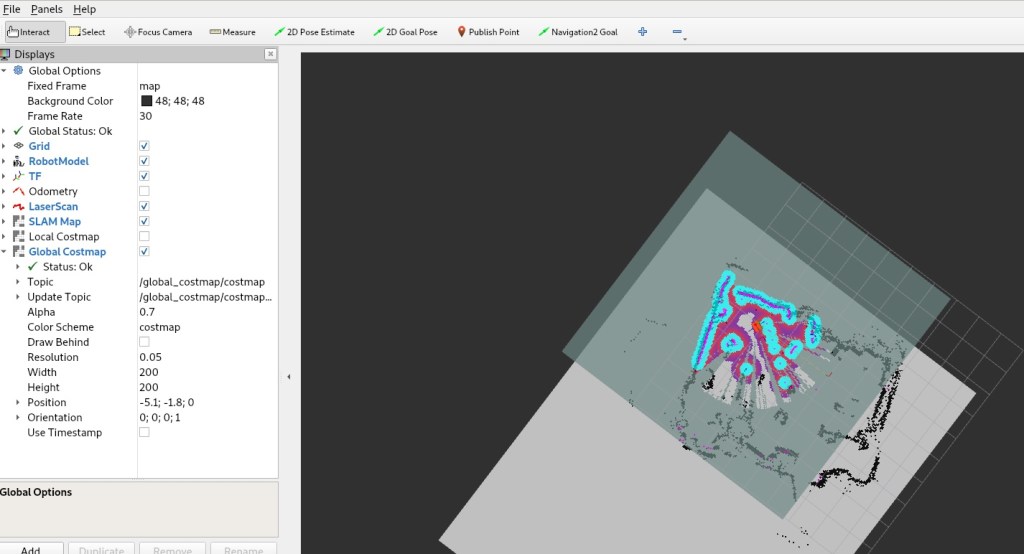
One issue I ran into after implementing Nav2 was that my Global Costmap was offset from the robot.

This ended up being a pretty easy fix. In your Nav2 configuration you can simply set rolling_window to true. This will centre the costmap on the robot as it moves around.

A second issue was the size of the costmap. I was only able to set navigation waypoints that were within 5m (note the size of the grey shading). To get around this you can use nav2 parameters again to increase the width and height. In my case I doubled the default (from 5m to 10m).
This is the config I ended up with:
global_costmap:
global_costmap:
ros__parameters:
rolling_window: true
width: 10
height: 10
Thanks to these links for putting me on the right track:
