I ran into a small issue today on my RaspberryPi. Occasionally, when restarting scripts that utilised usb devices (lidar, arduino) the usb connections were locking up. This meant that when I tried to restart the scripts I wasn’t able to reconnect.
My initial solution was to simply restart the Pi each time it occurred. Unfortunately, this became pretty tedious when testing required a lot of relaunching.
In order to get around having to restart each time I used usbreset in a small script attached to my launch files. This allowed me to ensure that all usb devices were ready to go.
for id in $(lsusb | grep -oP 'ID \S+' | awk '{print $2}'); do
echo "Resetting device $id"
sudo usbreset "$id"
sleep 1 # Add a small delay between resets
done
Note that you can also simply paste this into your shell. This was done on a RaspberryPi that has been imaged with Ubuntu, but I expect it will work on Raspbian as well.
I finally have my diffdrive robot navigating with waypoints using Nav2 and this great tutorial. However, while trying to use a saved map for localization I ran into the following error:
ros2 launch my_bot localization_launch.py use_sim_time:=false
....
ocalization]: Configuring map_server
[map_server-1] [INFO] [1673064055.126698671] [map_server]: Configuring
[map_server-1] [ERROR] [map_io]: Failed processing YAML file /home/chris/Desktop/dev_ws/install/my_bot/share/my_bot/maps/chris_room_07012023/chris_room_save.yaml at position (-1:-1) for reason: bad file
[map_server-1] [ERROR] [1673064055.126801797] []: Caught exception in callback for transition 10
[map_server-1] [ERROR] [1673064055.126805589] []: Original error: Failed to load map yaml file: /home/chris/Desktop/dev_ws/install/my_bot/share/my_bot/maps/chris_room_07012023/chris_room_save.yaml
[map_server-1] [WARN] [1673064055.126811964] []: Error occurred while doing error handling.
[map_server-1] [FATAL] [1673064055.126815339] [map_server]: Lifecycle node map_server does not have error state implemented
[map_server-1] [INFO] [map_io]: Loading yaml file: /home/chris/Desktop/dev_ws/install/my_bot/share/my_bot/maps/chris_room_07012023/chris_room_save.yaml
[lifecycle_manager-3] [ERROR] [1673064055.127951438] [lifecycle_manager_localization]: Failed to change state for node: map_server
[lifecycle_manager-3] [ERROR] [1673064055.128136607] [lifecycle_manager_localization]: Failed to bring up all requested nodes. Aborting bringup.
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
I had the following entry in my launch file:
DeclareLaunchArgument(
'map',
default_value=os.path.join(bringup_dir, 'maps', 'chris_room_07012023/chris_room_save.yaml'),
description='Full path to map yaml file to load'),
My map was also in the correct folder and valid output from the slam_toolbox plugin in rviz2. I had also run `colcon build –symlink-install`.
Initially I thought that I’d used the wrong settings in rviz but eventually I realised that the file was missing from the install directory. Despite running colcon build it was not building my new map files.
Luckily, this ended up being a fairly easy fix. I’d simply missed adding the directory to CMakeLists.txt.
# Add maps to the end of the DIRECTORY line.
install(
DIRECTORY config description launch worlds maps
DESTINATION share/${PROJECT_NAME}
)
After updating CMakeLists.txt and re-running colcon build --symlink-install I was finally able to start localization with a default map.
I’m messing around with a diff-drive robot and have been hitting an intermittent issue with my Lidar:
[INFO] [rplidar_composition-1]: process started with pid [5959]
[rplidar_composition-1] [INFO] [1672456772.854599418] [rplidar_node]: RPLIDAR running on ROS 2 package rplidar_ros. SDK Version: '1.12.0'
[rplidar_composition-1] [INFO] [1672456775.375585284] [rplidar_node]: RPLIDAR S/N: CD8EED93C0EA98C7A0E69BF55D504560
[rplidar_composition-1] [INFO] [1672456775.375837134] [rplidar_node]: Firmware Ver: 1.29
[rplidar_composition-1] [INFO] [1672456775.375932041] [rplidar_node]: Hardware Rev: 7
[rplidar_composition-1] [INFO] [1672456775.377533563] [rplidar_node]: RPLidar health status : '0'
[rplidar_composition-1] [ERROR] [1672456777.925797978] [rplidar_node]: Cannot start scan: '80008000'
This turned out to be a low power issue. The Pi’s voltage had been dropping to about 4.5v as my 12v battery grew a little flat. Recharging the battery immediately fixed the issue.
For a more permanent fix I will switch to a larger battery. Alternatively, using a USB hub with its own power supply would also work.
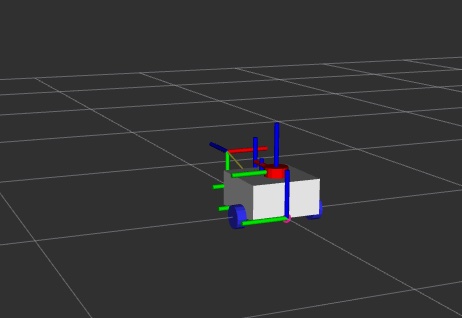
I hope you’re having a good break! I’m currently following this tutorial and messing around with a diffdrive robot. After making a few changes I noticed that my simulations were playing up. Strangely, the robot itself was still working perfectly fine.
The problem I was having was that even though my robot was driving forward the simulations seemed to think that the left wheel was going backwards. Initially I suspected this was an issue with my robot’s definition but even when returning to a known working state the issue persisted.
Eventually, I realised that this meant it had to be a hardware issue. I am using an Arduino and two L298N motor controllers for the motors that run my wheels. The arduino then publishes my encoding counts over serial.
To debug this setup, I used miniterm to communicate with the arduino and view the serial output. To get this going I had to track down which serial port had the arduino connected:
ubuntu@ubuntu:~/robot_ws$ lsusb Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 001 Device 006: ID 1a86:7523 QinHeng Electronics HL-340 USB-Serial adapter
Alternatively, ls /dev/ttyUSB* would also work. I also needed the baud rate which is set to 57600. This allowed me to connect, move the motors forward and also see the encoding counts:
ubuntu@ubuntu:~/robot_ws$ miniterm -e /dev/ttyUSB0 57600 --- Miniterm on /dev/ttyUSB0 57600,8,N,1 --- --- Quit: Ctrl+] | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- e 0 0 o 255 255 OK e -5531 5572 e -8120 8222 e -8120 8222
The issue became obvious with the left wheel outputting a negative value. The fix for this was pretty simple. Reversing the pins outputting the encoding count for the left wheel reverses the counter. Re-running the miniterm test showed both wheels with a positive count:
ubuntu@ubuntu:~/robot_ws$ miniterm -e /dev/ttyUSB0 57600 --- Miniterm on /dev/ttyUSB0 57600,8,N,1 --- --- Quit: Ctrl+] | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- e 0 0 o 255 255 OK e 8146 8211
A bit of a different sort of post this time. I’ve been looking for a new side project for a couple of weeks after finally deciding to shelve the one I’ve been working on for the last six months or so.
I had intended to build a small scraping bot as a subscription service for recruiters but soon realised that this was a pretty typical (and bad) pattern for me. I enjoy the building phase so I tend to build apps without verifying the market. I then dread engaging an unknown market and move onto something else.
I decided I would at least try to do things properly this time. Instead of building an idea of my own I decided to find a business and ask them if they had any issues that were big enough that would pay a monthly subscription to fix.
My first point of contact was an old colleague that had hired me to do some freelance work a number of times. They were keen, but unfortunately they would be pretty tied up with another project for at least the next few months.
At this point I almost went back to the recruiting idea until thinking of an approach that was a little different and definitely outside my comfort zone…Reddit?
I searched a few entrepreneur subreddits but they didn’t seem to be quite right. I then came across https://www.reddit.com/r/smallbusiness which looked a bit more promising. I had hoped to find an Australian version so that I could work with someone a bit closer to home but there didn’t seem to be a decent equivalent. I did a bit more browsing and eventually decided that /r/smallbusiness was probably a pretty good starting point.
The Reddit Post
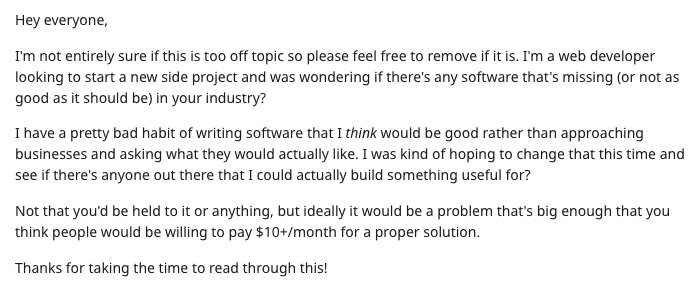
Posting to social media is definitely not something that I normally do. I occasionally comment, but for the most part I’m pretty passive. This is the post I ended up putting on the site:
I spent a bit of time thinking about how to approach this and decided that there were a few key things I needed for a businesses problem to be suitable.
Should be a subscription service
I have spent a lot of time building market places and platform services. Unfortunately these tend to take a long time to develop and accepting payments on behalf of another business can get complicated and potentially risky. Communicating these requirements via Reddit would be challenging at best.
A simple subscription service using stripe will significantly cut my development time. Building a product that charges a monthly subscription also gives me an easy way to evaluate how much a solution is worth to a customer. If they’re not willing to pay a subscription I immediately know that I need to look for another problem. I decided that $10/month was probably a good figure to start on. If they were willing to pay that I would consider the project, if not I’d move onto the next.
The scope should be small and easily defined
The proposed problem needs to have clear and easily defined requirements. It’s quite likely that I will only have a few short comments to get ALL of my information. I need to be able to understand it quickly and to be able to develop an MVP without any additional input from the user.
Preferably a B2B problem, not B2C
This one is more of a personal preference and definitely not firm but I find it’s easier to work with a business than a customer and there’s generally a bit less competition.
The Comments
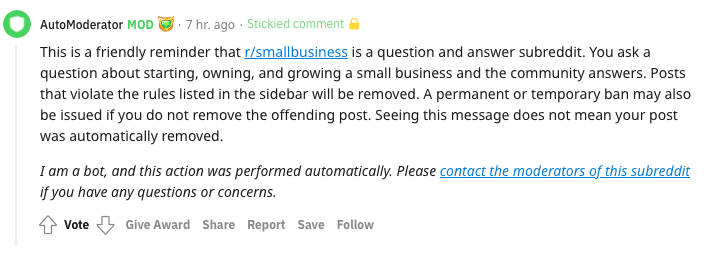
I had half expected for my post to get removed and skim reading the very first comment definitely gave me a bit of a scare:
But luckily my post stayed up and it was only a short while later that the first business problem was posted:
I was pretty happy with this one. I have previously built a few booking systems for driving schools so I knew this was something I’d be able to do. Unfortunately, a few comments later confirmed my sneaking suspicion that this would be a fairly saturated market:
I was definitely still open to the idea, but decided to wait and see if there were any more ideas that cropped up.
It took a little while, but eventually there was another suggestion that piqued my interested:
It took a couple of comments to sort out exactly what was being requested for this one:
There were a few important bits to this one that put it at the top of my list. Firstly, the problem is well defined and there’s definitely room for an MVP with potential to extend the scope if things go well.
The problem is also something that I can see appealing to other businesses that are just chasing a bare bones asset management system. A fully fledged system is complex and requires a high price tag in order to justify the development cost. This was much smaller and definitely something that a single developer could pull off.
The third, and probably most important factor is that the seller would be elated to be able to find a solution for $25/month. The number here is important because I had only put forward a $10/month price – they were definitely keen to find a solution.
The snag
I worked on a few quick mocks and shared these with the potential customer. She seemed pretty happy and had a few suggestions around including imports/exports and a number of additional fields.
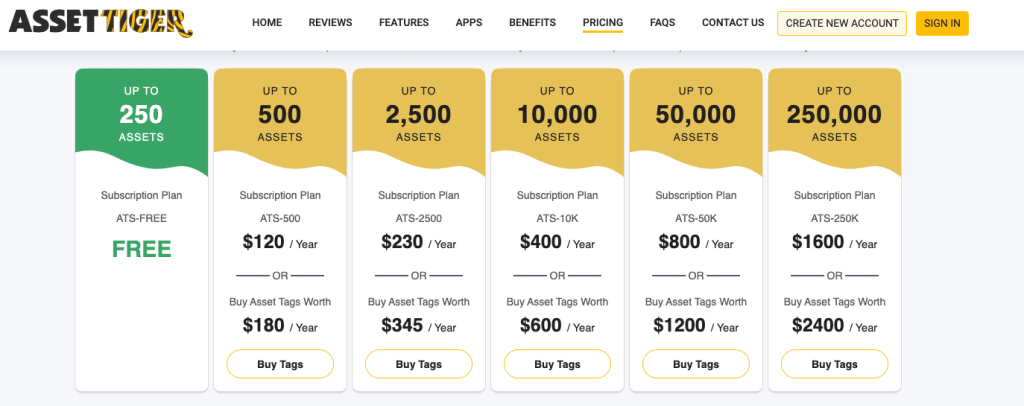
At this point I was pretty happy with things and decided to do a bit of competitor analysis. Unfortunately, this is when I came across AssetTiger:
They had literally everything that the customer was looking for and well within their budget of $25 per month. I double checked with them to confirm my suspicions and unfortunately it looked like AssetTiger was exactly what they were after:
They were were pretty appreciative and even offered to send a donation which was a really generous offer. Unfortunately, I’d now exhausted all of the project suggestions on the post.
What next?
I really liked the quick feedback on the suggestions in /r/smallbusiness and have decided that I will try this on a few more subreddits to see if the approach will work.
One thing that I would like to do a little differently is to try targeting an underserved industry specific subreddit e.g. agriculture or weddings. I think that this might help to mitigate the issue of suggestions that already exists – other redditors are likely to chip in with solutions that they use. Because everyone in the subreddit is in the same industry I think there’s also good chance that it will allow me to identify if multiple people are affected by the problem.
Anyway, if you’ve made it this far – thanks for reading! I’ll post an update on how the next reddit posts go!
It’s been a long time but I’m messing around with AWS SAM again. I’m currently converting www.testerwidgets.com into an AWS SAM application. As part of this I needed to add a custom domain. Unfortunately, the doco on how to do this isn’t great so I’m going to share what ended up working for me just in case it helps someone else.
To start, these are the resources that you’ll need in your template.yaml:
Resources:
ApiCertificate:
Type: AWS::CertificateManager::Certificate
Properties:
DomainName: !Sub api-${Stage}.YOUR_DOMAIN.com
ValidationMethod: DNS
ApiGatewayApi:
Type: AWS::Serverless::Api
Properties:
StageName: !Ref Stage
# Allows www.YOUR_DOMAIN.com to call these APIs
# SAM will automatically add AllowMethods with a list of methods for this API
Cors: "'www.YOUR_DOMAIN.com'"
EndpointConfiguration: REGIONAL
Domain:
DomainName: !Sub api-${Stage}.YOUR_DOMAIN.com
CertificateArn: !Ref ApiCertificate
Route53:
HostedZoneName: "YOUR_DOMAIN.com." # NOTE: The period at the end is required
You’ll also need to make sure your reference the gateway from your function:
# This lambda function handles is used to test endpoint availability.
getPing:
Type: AWS::Serverless::Function
Properties:
Handler: src/handlers/get-ping.getPingHandler
Runtime: nodejs14.x
Architectures:
- x86_64
MemorySize: 128
Timeout: 30
Events:
Api:
Type: Api
Properties:
Path: /ping2 # NOTE: AWS overrides the ping command.
Method: GET
RestApiId:
Ref: ApiGatewayApi # NOTE: Make sure you have this referencing correctly.
Description: Responds with 'Pong' if successful.
Now when you run AWS deploy it will continue as usual until it gets to the stage of creating your certificate:
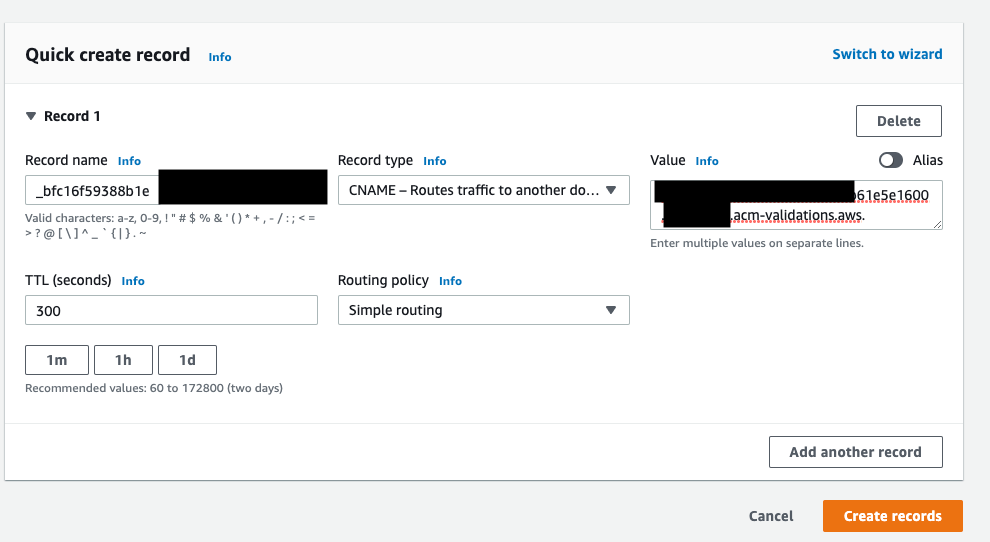
Here it is looking for a specific DNS entry in order to confirm that you own the domain. You’ll need to go into Route53 (or whichever other DNS provider you’re using) and add a CNAME entry with the specified details:
Note that your name and value contents should come from the output of the ApiCertificate job (highlighted in the screenshot above).
Once that’s done you’ll need to wait about sixty seconds for the DNS records to propagate within AWS. You should then be able to access your api using the new domain:
Note that if you get the error above when trying to deploy please ensure that you’ve added the trailing “.” to your Route53 HostedZoneName in the api-gateway in your template.yaml:
Domain:
DomainName: !Sub api-${Stage}.yourdomain.com
CertificateArn: !Ref ApiCertificate
Route53:
HostedZoneName: "your-domain.com." # NOTE: The period at the end is required
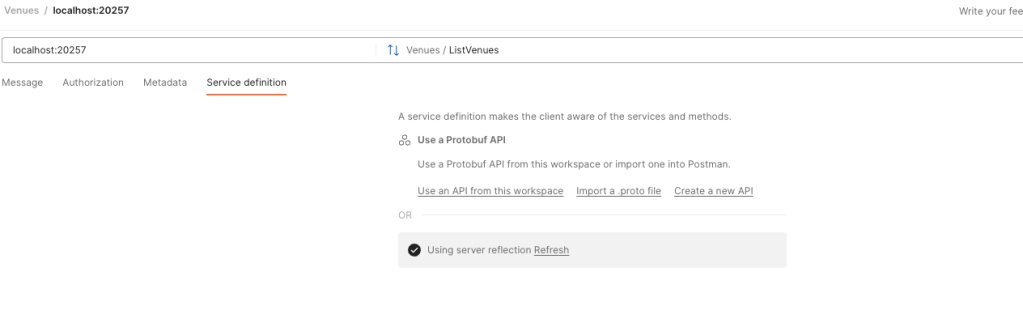
I was trying to create a migration in a new project within a solution and received the following error:
Build started…
Build succeeded.
Your startup project ‘SubscriptionManagementGrpcService’ doesn’t reference Microsoft.EntityFrameworkCore.Design. This package is required for the Entity Framework Core Tools to work. Ensure your startup project is correct, install the package, and try again.
The error was a bit confusing because all of my migrations for the rest of the solution were still working and none of my other startup projects had Microsoft.EntityFrameworkCore.Design as a reference.
After a bit of comparing I realised that the other projects all referenced data projects that in turn referenced Microsoft.EntityFramework.Design. Adding the package reference to the subscription data library referenced by my GrpcService fixed the issue.
I ran into a small issue today using docker-compose. I had a config file I was trying to mount as a volume however running “docker-compose up” generated a folder instead.
ERROR: for grafana Cannot start service grafana: OCI runtime create failed: container_linux.go:349: starting container process caused “process_linux.go:449: container init caused \”rootfs_linux.go:58: mounting \\\”/host_mnt/e/repos/Sample-Twitch/grafana/datasources.yml\\\” to rootfs \\\”/var/lib/docker/overlay2/f5c9553407551b68dc5d5877d748ba2bf7d2f0dd2ad12c73e39be40af185c82d/merged\\\” at \\\”/var/lib/docker/overlay2/f5c9553407551b68dc5d5877d748ba2bf7d2f0dd2ad12c73e39be40af185c82d/merged/etc/grafana/provisioning/datasources/prometheus.yaml\\\” caused \\\”not a directory\\\”\””: unknown: Are you trying to mount a directory onto a file (or vice-versa)? Check if the specified host path exists and is the expected type
ERROR: Encountered errors while bringing up the project.
The issue turned out to be an oversight on my part, I’d misspelled the config filename and docker was unable to find it. Consequently, it generated the missing file as a directory.
This is more for personal reference, but hopefully it’s able to help someone else as well. This post will simply be used for a list of RabbitMQ commands that I’ve found handy and may need to use again down the track.
Command
Description
Reference
Misc
rabbitmqctl stop_app rabbitmqctl reset # Be sure you really want to do this! rabbitmqctl start_app