Hi everyone,
I’ve been messing around with ROS2 on a RaspberryPi and a Mac using Parallels to run Ubuntu. I hit a small snag when trying to get the nodes to communicate. The nodes on the RaspberryPi could not reach the ones being hosted on Ubuntu (Parallels).
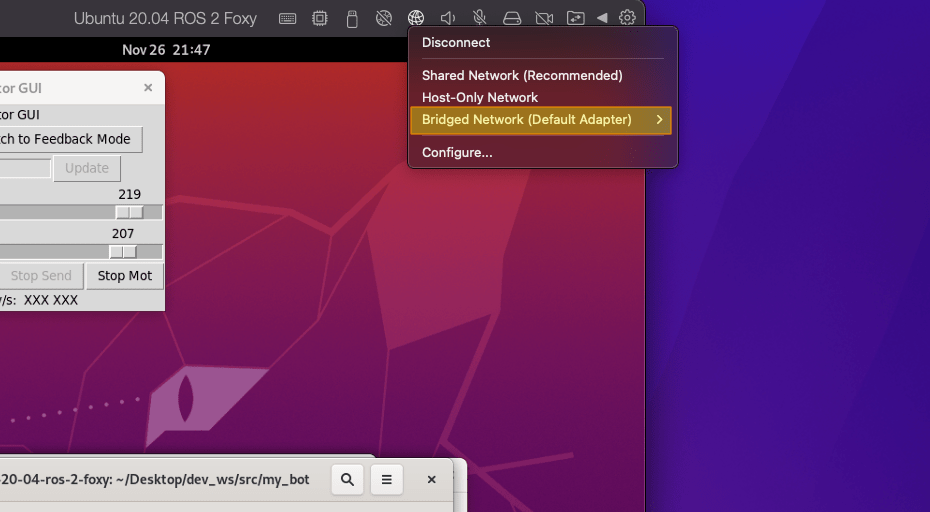
While I initially assumed that I had messed up my ROS workspaces, it turned out to be a problem with my Parallels config. I was using a shared network. Switching to bridged immediately resolved the issue.